Ever since I have written my experience using Precision Boost Overdrive 2 and Curve optimizer in my last blog post, I have been asked several questions on how to overclock your Ryzen 5000 CPU. Let’s discuss the basics for overclocking on Ryzen 5000.
Please treat this guide as a beginner starting guide – you’ll need to spend a lot of time tweaking, especially on the curve optimizer. This is not an ultimate overclocking guide and some people might (and already did) not agree with the values and flow of this guide. Having said that, even if other approaches may be better, they will be slightly better, maybe 1-3% better, within margin of error. Following this guide WILL net you a performance gain; maybe not the BEST performance gain but a measurable one.
The following guide should work for the following CPUs:
- Ryzen 9 5950x
- Ryzen 9 5900x
- Ryzen 7 5800x
- Ryzen 5 5600x
The following should similarly work for Ryzen 3000 series, but you will not have access to the Curve Optimizer. Blame AMD for this.
Ryzen 5000 – Traditional overclocking is dead
Traditional overclocking involved going into the BIOS, typing a nice voltage and a reasonable clock speed and you are done. You can do it, and you will get a nice score in Cinebench, but you’ll lose everyday performance. Why?
By turning on a fixed max boost clock, you will be losing the higher boost clocks achieved when doing lightly threaded workloads (unless you manage to overclock to a fixed 5Ghz..if you do that, please write a guide for us!). These are the kind of workloads that you go through every day, which are the most important. If you set a max overclock of say 4.6 GHz, you won’t be able to go over 4.6 GHz in common tasks, which will slow them down.
Ryzen’s boost algorithm is smart
On the other hand, Ryzen’s boost algorithm is designed to go past the usual clocks and boost as much as possible, given there is enough power coming in and the temperatures are in check. Trust the AMD engineers in this case. In my case, my 5900x is easily able to go past 5GHz.
The golden trio – PBO2, Power Settings and Curve Optimizer
In order to achieve an actual “overclock” on Ryzen 5000, we’ll need to dive into three major components – PBO2, Curve Optimizer and Power Settings
Precision Boost Overdrive 2
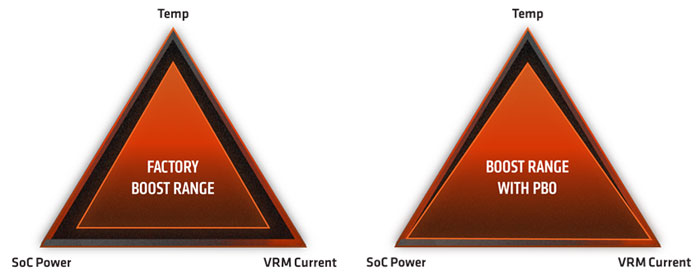
Precision Boost Overdrive (PBO for short) is when you extend the out of the box parameters that dictate performance on a Ryzen CPU – Temperature, SoC (chip) power and VRM Current (power delivery). PBO extends the maximum threshold for these components, allowing faster clock speeds to be achieved for a longer time. In short, this is AMD’s inbuilt overclocking capabilities baked into your CPU.
Power Settings
Here, I’m referring to the three major power settings – PPT, TDC and EDC. PPT is the total power that the CPU can intake. TDC is the amount of amperage the CPU is fed, under sustained load (thermally and electrically limited). EDC is the amount of amperage the CPU is fed, under short bursts (electrically limited). Allowing the CPU to take more power overall allows the CPU to boost to higher clock speeds. From the PBO triangle analogy, this positively impacts the left and right vertices – SoC power and VRM Current, while negatively impacting the top vertex – heat.
Curve Optimizer
Curve optimizer allows you to undervolt your CPU. Undervolting means that you’re pushing slightly less voltage, which consumes less power and generates less heat. This, combined with Precision Boost Overdrive 2 means that you’re pushing less heat, allowing the CPU to boost clock speeds. From the PBO triangle analogy, this mostly impacts the top vertex – heat.
Striking a balance with your settings and overclocking your Ryzen 5000
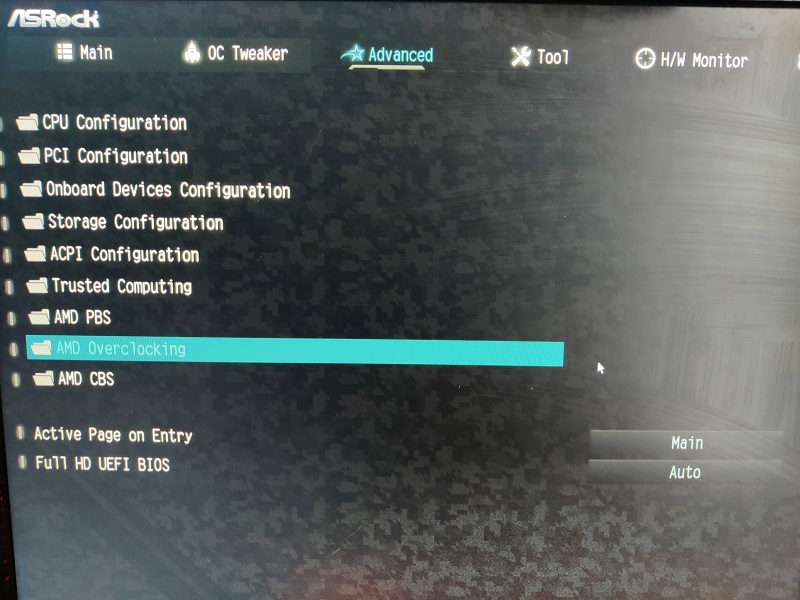
Now, that we’ve established our three main players, let’s tackle them one by one. To access these settings, you’ll need to access your BIOS – these settings are typically located in Advanced -> AMD Overclocking -> Precision Boost Overdive. Here’s a sample from my ASRock x570 Steel Legend.
After discussions with my readers, people seem to be suggesting different priorities when it comes to overclocking. I believe that a modest yet stable overclock can be achieved by prioritizing these:
- Scalar / Max CPU Override
- Power Settings
- Curve Optimizer
Some readers believe that the best priority is:
- Curve Optimizer
- Power Settings
- Scalar / Max CPU Override
If you are confused like me, pick the easiest and consider following this guide. Both will provide a nice performance gain and the differences you might see from one method to another may be in 1-2% more gain, which is negligible in real life.

Precision Boost Overdrive 2
This should be the easiest, let us just follow AMD’s recommendations. Looking at their slides here – AMD Precision Boost Overdrive 2 : Official Tech Briefing! – YouTube) we can start by looking at the setting that matter to turning on PBO.
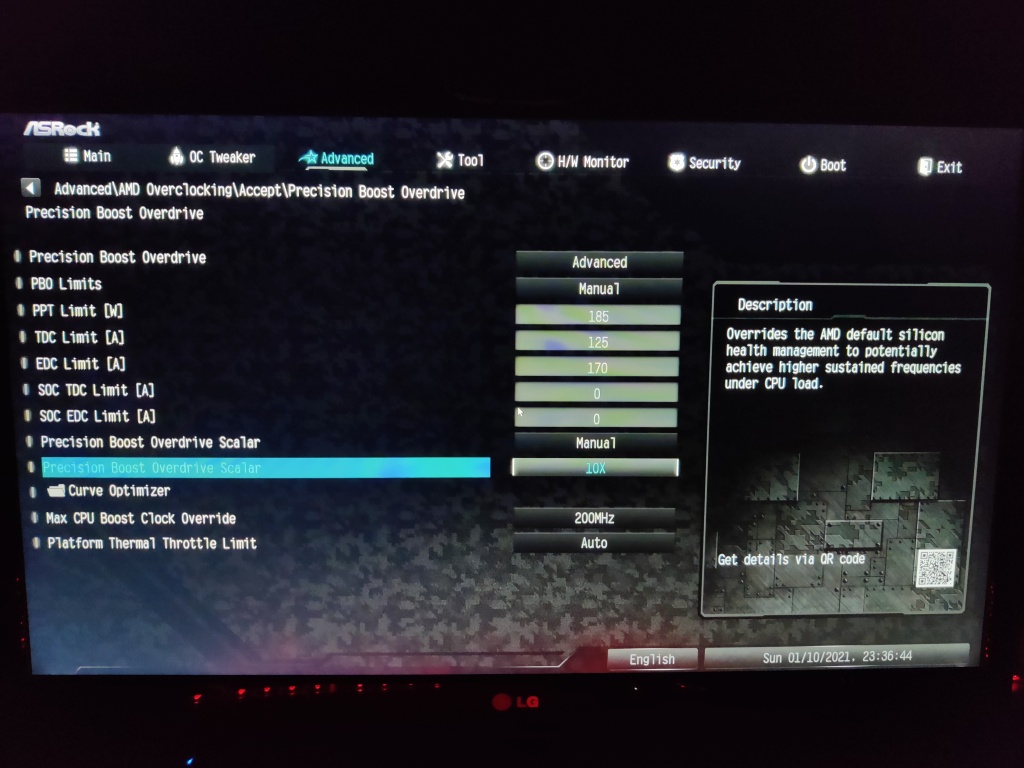
- Precision Boost Overdrive – Advanced
- Allows us to turn on PBO and allows us to make manual adjustments to PBO settings
- PBO Scalar – 10X
- Should allow you sustain boost clocks for longer.
- Some readers debate whether this value should actually be 1x; I cannot verify this. These readers debate that setting it to 10x will raise your overall voltage. During my brief testing, I’ve observed that this is not the case, but this statement can (and might change) with more testing
- Max CPU Boost Clock Override – 200Mhz
- Raises your max frequency by 200Mhz. On a 5900x, this translates to a theoretical limit of 5150Mhz, which is realistic.
- I am told by my readers that setting a +200 boost on the Max CPU Boost Clock Override might negatively impact how much you’ll end up pushing on the Curve Optimizer. Unfortunately I’ve not neither the time or data to back up this fact.
- PURE SPECULATION / MY THOUGHTS AHEAD (No data to back up this claim whatsoever) -By reducing the Max CPU Boost Clock Override, you’ll of course be losing the highest single core boost clock speeds, **potentially** reducing single core performance, but you’ll be able to push more multi core score, or reaching the “lower” max single core performance more regularly. These will require extensive testing separately (and probably translate into margin of error when it comes to results).

Power Settings
In their slides (link above), AMD suggest using Power Limits = Motherboard. I strongly discourage this as it may limit your power intake (this was noticed both by me and readers in my blog – My Experience with Precision Boost Overdrive 2 on a 5900X – Albert Herd, comment by Julien Galland).
For my 5900X, these are the settings that I’ve applied. If you got a 5950X, 5900x 5800x, these values may (or may not) be suitable for you. If you got a 5800X or lower, these values are too high and will hinder performance. Applying lower settings to accommodate your CPU – apply a decent bump to the values quoted below by AMD. Unfortunately, I don’t own anything else apart from a 5900X so I cannot vouch for these settings for other models.
- If you got very good cooling (such a custom loop or strong cooling in general)
- PPT – 185W
- TDC – 125A
- EDC – 170A
- If your cooler will get too hot with these settings, try a more conservative setting. In my case, this setting hovers around 70-75C
- PPT – 165W
- TDC – 120A
- EDC – 150A
You might notice that your CPU might run too “cool” or too hot. In this case, adjust your figures accordingly. In a multi core benchmark, these figures should all hit a 100%. In most workloads, its the EDC that plays a role, not TDC (since most workloads are considered as short burst). I also noticed that going too low on EDC will cause instability.
Leave SOC TDC and SOC EDC to 0, these should not impact us (I believe this mostly applies for APUs).
For completeness sake, please keep in mind AMD’s default values when making adjustments to these values:
- Package Power Tracking (PPT): 142W 5950x, 5900x and 5800x and 88W for 5600x.
- Thermal Design Current (TDC): 95A 5950x, 5900x and 5800x and 60A for 5600x.
- Electrical Design Current (EDC): 140A 5950x, 5900x and 5800x and 90A for 5600x.

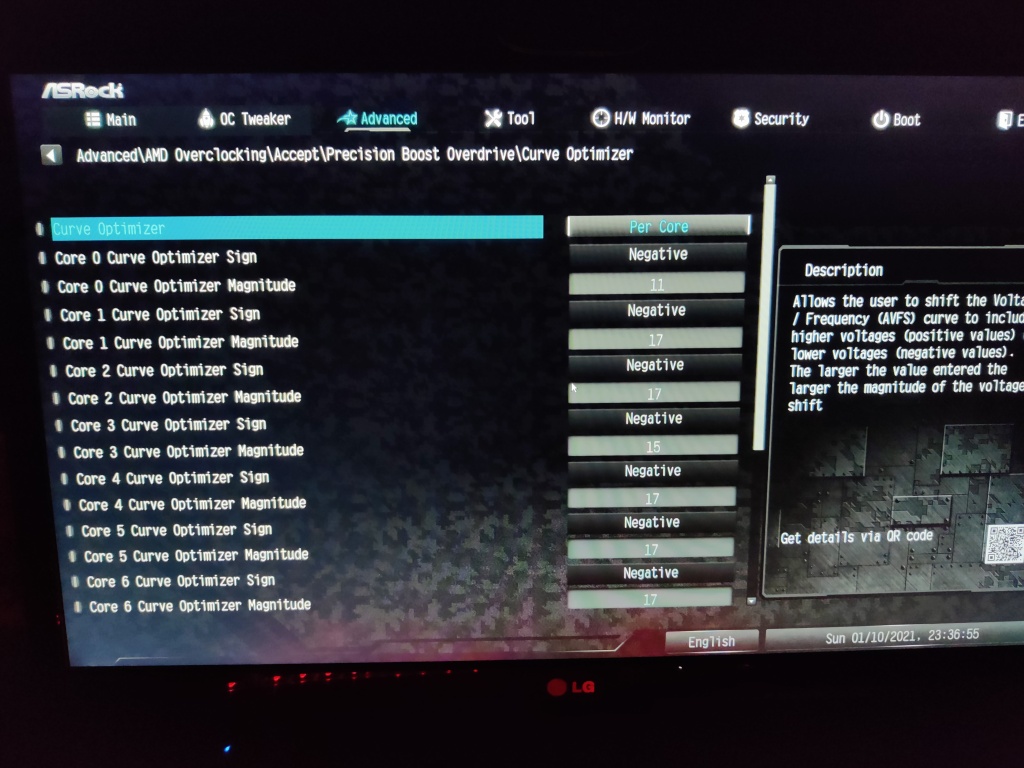
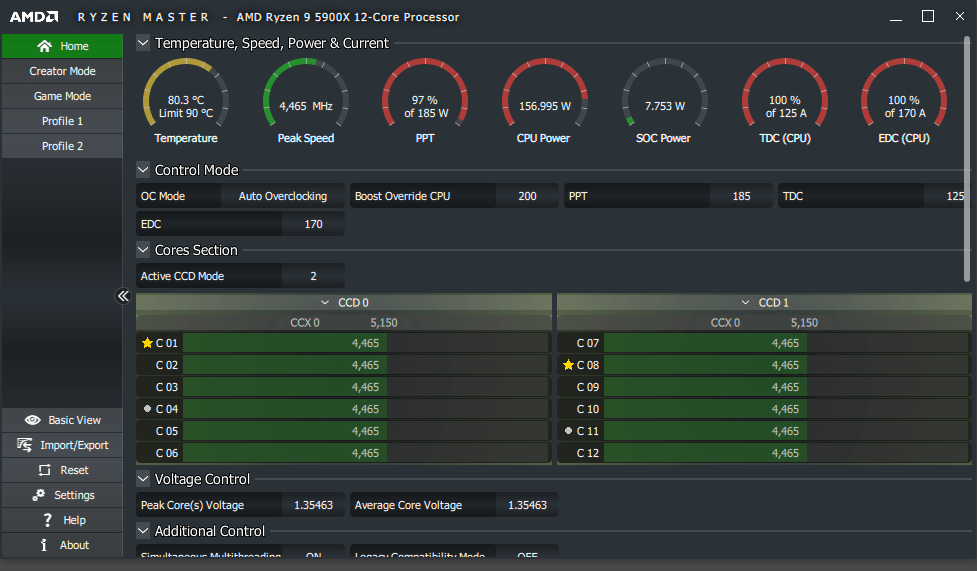
Curve optimizer
This is probably the most annoying one. The numbers you’re inputting here will vary significantly from one chip to another, so your mileage may vary. These are my values:
- Negative 11 for the first preferred cores on CCX 0 (as indicated by Ryzen Master)
- Negative 15 for the second preferred core on CCX 0 (as indicated by Ryzen Master)
- Negative 17 for the other cores.
If you want to start safe, you can apply a Negative 10 offset on all cores.


Testing this setting is extremely painful. You’ll notice that crashes will not happen under load; crashes will happen under idle conditions, where your CPU undervolts too much. Hopefully, AMD will look at this algorithm in future BIOS updates and provide more stability. In my experience, Geekbench 5 – Cross-Platform Benchmark is a great tool to stress my CPU out, it tends to crash it when the settings are not right.
Please keep in mind the note that I’ve written about the Max CPU Boost Override (under the header – Precision Boost Overdrive 2). Some users note that they prefer to keep Max CPU Boost Override lower and push for a more aggressive curve.
In my next post, we will look at how to get the best performance from your RAM, by applying specific DRAM configurations according to the RAM sticks you own. If you feel adventurous and feel like you can do it on your own:
- DRAM Calculator for Ryzen (v1.7.3) Download | TechPowerUp – download this application and dial in your settings
- Download Thaiphoon Burner 16.5.0.1 build 0101 Shareware / 16.3.4.0 Build 1005 Freeware (softpedia.com) – you’ll need this to identify the chip manufacturer of your RAM, which is required in DRAM calculator.
Thanks for reading!